Det är kul när folk i Blur-teamet seglar nya race.
Här kommer en rapport från Johan Fredriksson, som rundat Long Island.
Kul också att Josh Reisberg i J/120 Abilyn spikade DH-klassen. Vi hängde en delö när vi seglare Bermuda 1-2 mot varandra.
Att starta framför Frihetsgudinnan har alltid funnits på min bucket list. Så när jag sprang på Ken Wisdom – hans Arcona 435 var jag med på under ARC 2024 -och fick frågan “Would you like to come and join us? We need to be 8 in the crew” tog betänketiden ungefär två sekunder.
Detta var sex dagar före start, så det blev bråttom med flygbokning och packning av Gore-Tex. Att yngsta dottern kunde följa med gjorde beslutet ännu enklare.
Around Long Island Race (ALIR) körs årligen, och det här var 49:e upplagan. Välkomstfesten satte nivån direkt: fri bar och italiensk buffé med en ostbricka i XXL-format.
Banan är enkel att beskriva: runda Long Island om babord, 207 sjömil fågelvägen. Starten var desto svårare. Två knops ström och väldigt puffigt mellan Staten Island och Battery Park. Vi lyckades precis undvika lä-båtens ankarlina och kryssade långsamt söderut med Frihetsgudinnan om ena sidan och Long Island om andra. Planen var att hålla vänsterkanten, eftersom strömmen satte in mot Manhattan med 1–3 knop i den lätta vinden. In på det grunda vattnet, bara. Notera också vårt försök att bygga AWS med Code 0 – det kändes i alla fall snabbt.
I vår klass fanns sex ORC-båtar, allt från J/121 Habiru – nytt ställ varje år, till och med barlasttankarna urplockade – till First 50 Crocodile, plus lite annat skoj.
Första kvällens solnedgång sitter kvar: Downtown i motljus med Chrysler Building och Empire State Building i siluett på avstånd. Sedan dragrace österut med J/121:an 2–3 sjömil framför. Via AIS och trackingsystemet YB kunde vi se att vi höll ganska jämna steg med proffsbesättningen.
Morgonen dag två bjöd på mycket lätt vind. Vår game plan var att gå nära land för att undvika ström, men det visade sig finnas mer ström än väntat precis utanför Hampton Bays. Tre stora valar och flera stim delfiner höll humöret uppe ombord.
Jag åkte upp i masten för att se var vinden fanns, och hämtade faktiskt hem en del av försprånget till J/121:an – men på slutet, före rundningen av Montauk, hittade de mer vind och drog ifrån igen till ungefär sex sjömil.
Mer än halva racet återstod, så det var bara att pusha hela tiden och inte bli sittande med fel segel. Från J2 till J1.5, vidare till Code 0, tillbaka till J1.5, och så vidare. Bra killar ombord och kanonmat underlättar. Vaktschemat körde vi 3 timmar på, 3 timmar standby och 3 timmar off med helig vila under däck – samma upplägg som vi använt på Blur under bland annat Middle Sea Race.
Tidvattnet rinner ut ur Long Island Sound med 2–3 knop när det är som starkast, så det gäller att hålla sig i strömlä nära Plum Gut. Här har man genom åren sett båtar kasta dragg för att inte åka åt fel håll. Andra natten stod vinden ganska länge, men efter midnatt låg vi och stampade i 1,5 knops SOG. Kom igen nu, gubbs. 😊
Vindskiftet från norr kom tidig morgon och fyllde förstås så att J/121:an kunde hålla undan. De gick i mål någon timme före oss, efter 43 timmars segling.
Vi hade fått låna en boj av båten Golden Eye (mint condition) och firade med bad och bärs. Prisutdelningen hölls söndag eftermiddag i underbar atmosfär på Sea Cliff Yacht Club.
Gänget på Pandeon får till sist ta emot sitt förstapris för ORC-klassen på Gotland Runt efter att det först delats ut till fel team. Foto: Daniel Stenholm.
Resultat är kanske inte det viktigaste med kappsegling.
Men att de stämmer, och att de kommer medans man fortfarande sitter i sittbrunnen och bryr sig – det är värt mer än vi låtsas om. I vilken annan sport väntar man ett par dygn på att få veta hur det gick?
Arrangörer brukar säga att det är krångligt och tar tid. Sant.
Men det går, om man vill.
På Marstrand Big Boat bestämde vi oss för att göra resultatrapportering till en grej. Med rätt setup kunde vi läsa upp resultat på VHF mellan seglingarna, ute på havet. Seglarna trodde inte det var sant. Vi hade också satt som mål att varje båt skulle få utskrivna resultatlistor i handen innan de hann kliva i land, och även det gick med lite logistik och en printer.
Dessutom visade det sig finnas en poäng i att hela teamet tittar på samma papperslista i stället för att var och en sitter böjd över sin mobil.
Nordön Race Week kör Google Sheets. Tävlingsledaren matar in målgångstider och alla seglare ser listan sorteras i realtid. Cred till Thomas Ottosson för. Ett kalkylark och viljan att visa vad man håller på med. Mer behövs inte.
Vad har hänt 2026?
I år har någonting hänt.
Eller snarare: en massa saker har hänt på olika ställen som tillsammans bildar ett mönster.
ORC Double Handed World Championship blev den första stora internationella smällen kring Weather Routing Scoring. Tyska GAIA gick i mål som tvåa och klassades sist efter WRS-korrigering. Protesten avslogs. Men diskussionen som följde handlade inte om räknefel — den handlade om att scoringmodellen kan producera utfall som seglare uppfattar som orimliga, utan att någon kan förklara varför.
Færderseilasen lyckades med konststycket att ha två olika resultatproblem samtidigt. Först administrativa fel: felregistrerade målgångstider och priser till fel båtar. Sedan en separat WRS-diskussion där KNS själva meddelade att valet av scoringsystem ska utvärderas: “Vi har fått tilbakemeldinger på en del feil i resultatene, og må bare beklage på det sterkeste at det har blitt slik.”
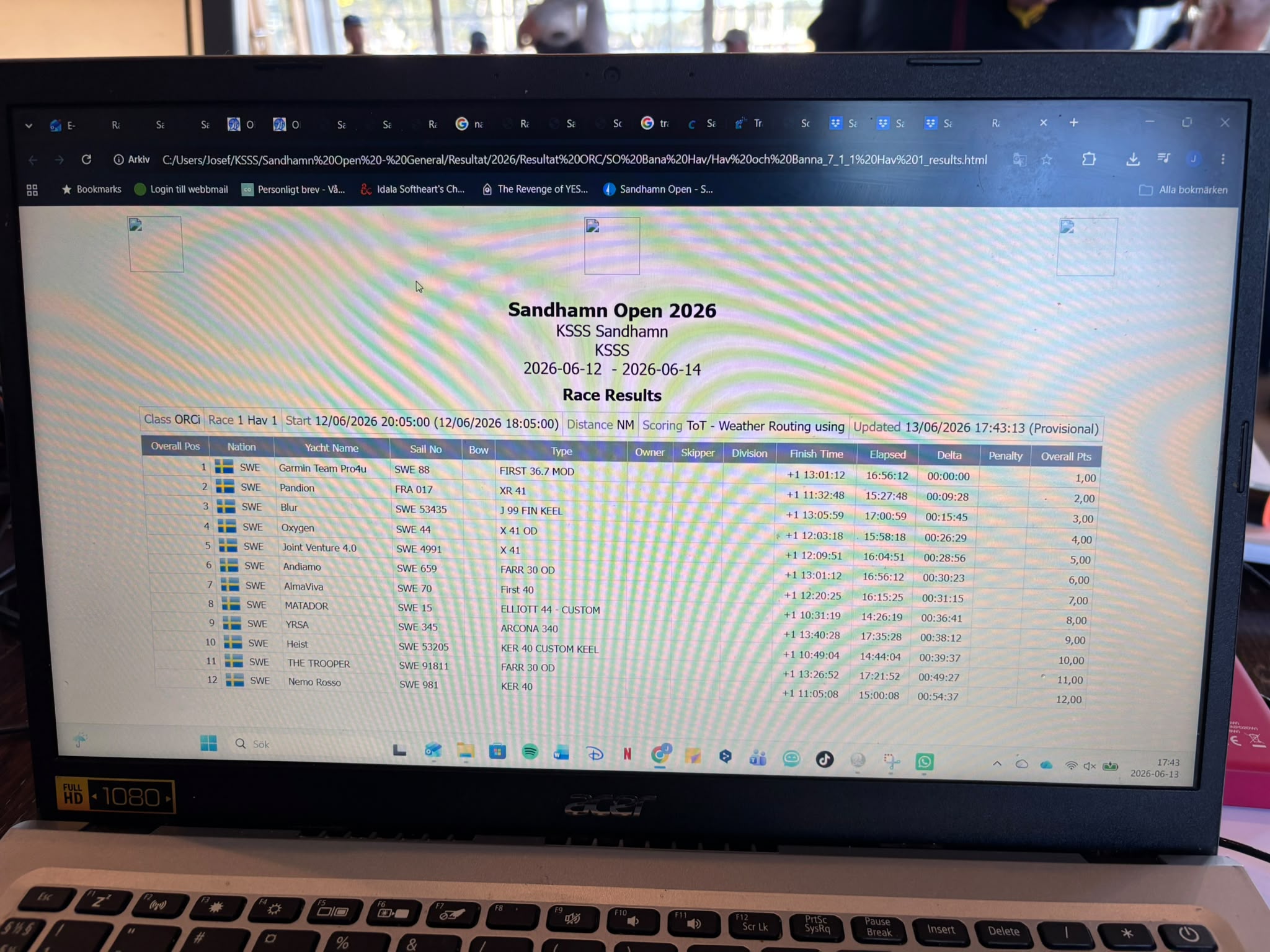
Sandhamn Open hade svårt att få fram resultat överhuvudtaget. Fyra timmar efter sista målgång kom en screenshot. De officiella resultaten dök upp dagen efter.
Gotland Runt funkade generellt bra – ända fram till prisutdelningen, där ORC-pokalen gick till fel team. Kalabalik på scen innan det rättades till. Man hade tittat på hur ORC-båtarna rankats i SRS.
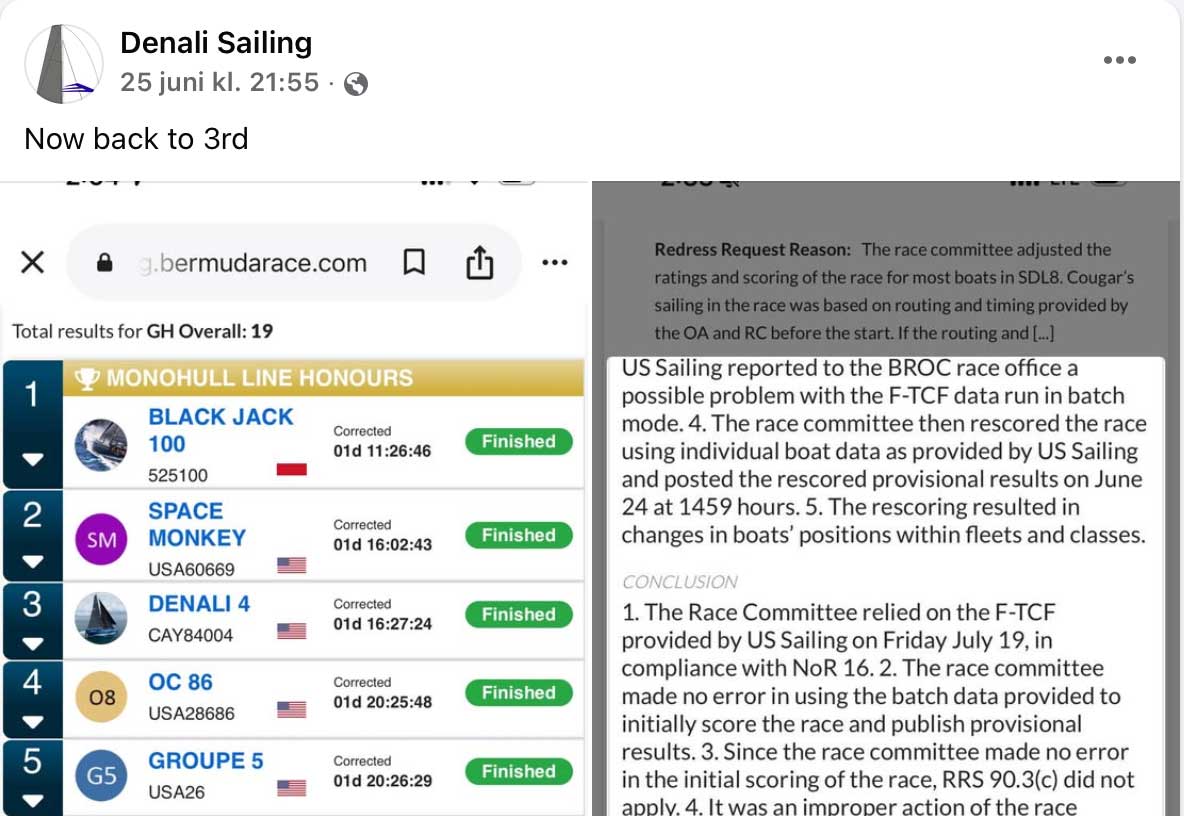
Newport Bermuda Race toppade alltihop. Ett programvarufel i beräkningen av Forecast Time Correction Factor gav felaktiga resultat, flera omräkningar och en försenad prisutdelning. US Sailing var ovanligt öppna: “US Sailing recognizes that the software-related issue affecting the corrected-time calculations has had a significant impact on competitors.”
Så där står vi.
Vi har ambitiösa arrangörer och funktionärer. Vi har kommittéer som sitter och funderar på sådana här saker under vinterhalvåret. Vi har mer teknik och datorkraft än någonsin…
Men också en säsong full av sena, felaktiga, omräknade och obegripliga resultat.
Sex frågor jag inte kan släppa
Har vi blivit sämre trots bättre teknik? En klubbtävling på 80-talet med papper och penna levererade snabbare än flera stora event 2026. Den ekvationen stämmer inte?
Är scoringmodellerna för komplexa? När varken seglare, funktionärer eller jury kan förklara varför en båt vann – vad har vi då byggt? Observera att det inte handlar om matematiska fel. Modellen kan räkna helt rätt och ändå misslyckas, för att ingen förstår eller accepterar svaret.
Varför är resultatet en black box? Nordön visar att motsatsen går utmärkt. Så varför publiceras inte indata, mellanresultat och beräkningar löpande? Vad är det vi skyddar, egentligen?
Kan resultaten reproduceras? Om två personer tar samma målgångstider, samma väderdata och samma mätbrev – får de då exakt samma resultatlista? Om svaret är nej finns inget förtroende att bygga på.
Vad är rimlig ledtid? Klubbsegling inom tio minuter, SM inom en halvtimme, offshore inom några timmar. Orimliga krav? Eller har vi bara vant oss vid att vänta?
Hur mycket komplexitet tål sporten? Hela handikappidén bygger på att seglare accepterar att de inte alltid vinner på vattnet. Det är ett rätt stort mentalt åtagande redan där. Gränsen går inte där modellen räknar fel – den går där resultatet slutar kännas begripligt. Och jag tror vi passerat den gränsen?
Vad är egentligen viktigast?
Att resultatet är matematiskt så korrekt som möjligt?
Att det är begripligt?
Att det går att verifiera?
Att seglarna litar på det?
Vi har optimerat stenhårt för det första. De tre andra åkte ut på vägen.
Och en enklare modell som alla förstår slår antagligen en perfekt modell som ingen litar på.
Veckans läsarfråga kommer från Johan på Xp-33 Tärna, som vi hade en bra fight med under årets Gotland Runt.
Hej Peter,
Jag seglar och hobbyrejsar min Xp33 Tärna med stort nöje. Jag seglar nästan uteslutande shorthand, och anpassar gradvis båten för detta. Just nu är fokus på ergonomi för rorsman. Jag har precis gjort om arrangemanget för trim av vagn, fintrim storsegel och akterstag så att de är enkelt åtkomliga för rorsman sittandes på styrplatsen.
Co-pilot Alexander Ekberg på väg mot Svenska Högarna på Gotland Runt 2026.
Xp33ans sittbrunn är generös, men vid längre sträcker med lite stökigare förhållanden har jag svårt att hitta position där jag kan sitta säkert utan att det blir jobbigt. Det kokar ned till två sammanlänkade problem;
1) Vid krängning (särskilt när det är lite sjö) vill mantåget trycka ned rorsman i sittbrunn
2) För att motverka detta får en försöka sitta så långt in mot centrum som möjligt, vilket ger för liten sittyta och dessutom kommer en för nära fotstöden, vilket blir jobbigt för benen.
Nu är jag på jakt efter inspiration, tankar, åsikter på temat; Vad är viktigt för att få god ergonomi för rorsman på en rorkultsbåt? Vilken båt har den skönaste styrplatsen? Vad bör en undvika?
Är justerbara rörfotstöd som på Figaro 3 nåt att ha (eller blir det mest snubbelrisk)?
Är eluppvärmd sittdyna som på Aspect 45 ett måste?
Är JPK 1050 übergrova gummimönster flip eller flop?
Det 49:e Hermanö Runt seglas i år lördagen 1 augusti. Segling tillåts med både ”full crew” och shorthanded.
Välkommen med din anmälan på email till hans.abrahamsson@gknaerospace.com eller sms till 0709-743334. Uppge sedvanlig information (dvs rorsman, mobil nr, email, båttyp, segel nr, ev båtnamn, SRS tal, ev mätbrev, segelklubb). Anmälan fram till onsdag 29 juli. Anmälan efter tisdag 28 juli kl 10 (dvs 96 tim innan start) endast till fullt SRS (dvs med full crew och med undanvindsegel). Vid anmälan, sms’a gärna en bild på din båt, som kan användas för inlägg på Hermanö Runt Facebook.
Anmälningsavgiften är 450 kr, och betalas till pg 362688-4 eller swish till 1232904613, senast onsdag 29 juli.
Arrangemanget/seglingen kommer att vara likt föregående år, dvs jaktstart i Hälleviksstrand, segling runt Måseskär och Härmanö – för att gå i mål på Käringön ca kl 16:30. Banan är ca 21 Nm. Återkommer med uppdaterade/årets seglingsinstruktioner och ytterligare information om arrangemanget, som emailas till anmälda båtar och efter fråga. Frågor om arrangemanget/seglingen besvaras på 0709-743334.
Information/uppdateringar om Hermanö Runt kommer i huvudsak att ges på Hermanö Runt’s Facebook sida. Anmälningslistor kommer att anslås löpande på Facebook.
Every spring you haul the boat and face the truth: whatever speed you had last season is living under a layer of slime and barnacles. So you grind it back and start over. No rocket science. Just willingness to spend time in the shed. Or to get help.
Grinding with water sanding paper: 360; 500; 600; 1000
New season we should be ok with step 5 & 6.
One note: this isn’t a one-time commitment. Every 2-3 weeks during the season, you’ll be back down there with a polishing pad, buying yourself another week of speed before the water takes it back.