Race med autopilot?
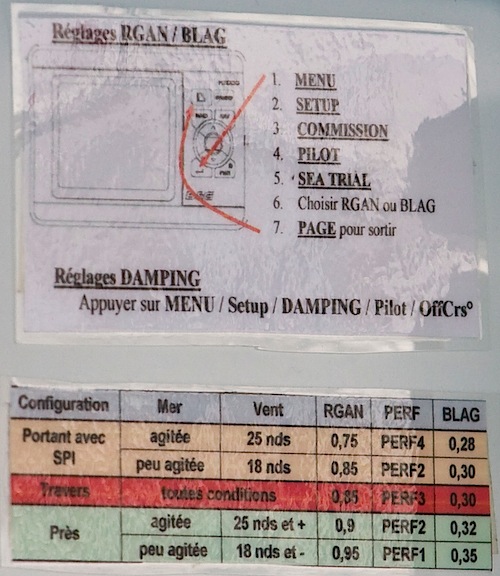
Så här ser lathunden på en Open 60 ut.
När man kör shorthanded-race kan det vara användbart med en autopilot. Doublehanded klarar man sig bra utan, men det kan finnas situationer där den gör nytta. Kör man solo, så är det av största vikt att man kan få den att funka bra, och styr båten rätt och dessutom snabbt.
Inget av detta funkar så klart “out of the box” utan det krävs träning och koll på grejerna. Jag pratade med killarna på Nexus, om man skulle kunna göra en workshop eller liknande för att gå igenom parametrarna, hur de bör ställas in under olika förhållanden, hur man skall tänka när man justerar och kanske kunde man skriva en kort guide kring detta.
På Nexus (http://www.nexusmarine.se/upload/marine/marine/manuals/autopilot_swe.pdf“>manual) finns följande parametrar att vrida på:
- P1, Roder [RUD] Påverkar hur stor rodervinkel som används.
- P2, Dämpning av kompasskursen [SEA] Denna inställning är en kombination av känsligheten och dämpningen av kompassen.
- P3, Stöttning [CRD] Denna inställning styr hur må nga grader per sekund Autopiloten skall styra för att göra en kurskorrigering till den eftersökta kursen.
- P4, Dämpning av vindvinkel [WSE] Denna inställning styr hur snabbt Autopiloten skall reagera på de vindskift som sker, beroende på bå tens rörelser i sjön, vindskift och förändringar i vindhastigheten.
- P5, Automatisk Trim Kalibrering [ATC] Denna inställning gör att Autopiloten kan ställas in för att lära sig vilken avvikelse rodervinkeln kommer att ha frå n 0° för att kunna upprätthålla den eftersökta kursen.
- P6, Adaptiv Kontroll [ADC] Denna funktion används inte för närvarande.
- P7, Automatisk Pilot Kalibrering [APC] Detta är den viktigaste kalibreringen man må ste göra innan Autopiloten går att använda
- P8, Reduktion av roderhastighet [RRS] Denna inställning styr med vilken hastighet pumpen på verkar drivenheten d.v.s. kolven.
- P9, Rodervinkelgräns [LIM] Denna inställning styr vilken maximal vinkel rodret skall kunna uppnå.
Skulle det finnas intresse för detta? Troligtvis i Stockholm efter nyår. I första hand för shorthandedseglare men även för andra som vill segla aktivt med sin autopilot. Lägg en kommentar nedan. Finns det tillräckligt stort intresse så fixar jag något.



2008-12-07 @ 18:17
Hej,
Denna fråga är intressant!
Enligt KSR är väl autopilot inte tillåtet, se regel 52 angående handkraft.
När vi planerade Vener Race förra året kom vi fram till att shorthanded skulle vara utan autopilot, annars blir det ju inte rättvist. Det är som att få en tredje besättningsman om man har autopilot. Jag har inte sett några undantag från regel 52 för någon annan segling heller, så hur tolkas denna regel?
2008-12-07 @ 19:46
Hej,
Det här är klart intressant för mig! Jag kommer gärna. Jag har ett behov att kalibrera min pilot i vår.
För övrigt tycker jag att det alltid ska vara tillåtet att köra med autopilot om man seglar solo. Båten seglar inte snabbare på autopilot men det ger mig åtminstone en chans att göra en hyggligt säker manöver. En så enkel grej som ett slag blir ganska komplicerat om man är ensam och det brallar i lite. Det här är ett av bekymren som jag har när jag anmäler mig till ett vanligt race men seglar ensam. Antingen seglar jag utan autopilot och föröker hantera båten efter bästa förmåga, slag, genackersättning på en person, äta, gå på muggen, eller så fuskar jag och använder piloten och riskerar att ngn blir förbannnad eller att jag blir diskad.
Jag tycker nog att det också är lämpligt på doublehanded, speciellt då racen är lite längre och man i praktiken seglar båten själv.
Jag skulle gärna se en regeländring som t ex tillåter autopilot när man seglar med fåmansbesättning.
2008-12-07 @ 19:55
Autopiloten är inte tillåtet, men den kan tillåtas i seglingsföreskrifter liksom watski2star: http://watski2star.se/2008/seglingsforeskrift_08.pdf
2008-12-07 @ 20:25
Som sagt, det är mycket vanligt att man gör detta undantag (från regel 52) i seglingsföreskrifterna. Under IRC så gäller inte regel 52 över huvud taget (om inte arrangören explicit väljer det). Det är ju aldrig snabbare att låta autopiloten styra, så fördelen för de som har det är marginell (ur rättviseperspektiv borde man snarare förbjuda nya segel eller båtlyft veckan innan race)… Men jag förstår resonemanget.
Alla solorace tillåter förmodligen autopilot :-)
2008-12-07 @ 20:44
Kanonintressant. Jag som har Raymarinepilot (kan tänka mig att många andra har det också) skulle förstås uppskatta om det gick att jaga upp någon därifrån också eller åtminstone att man kunde läsa på lite innan om hur motsvarande parametrar ser ut där.
2008-12-07 @ 21:01
Jag har seglad flera gånger en solorace i Finland som inte tillåter autopilot. Den är bara 10 M, men det kan vara svårt att gippa båtar som går inte alls rakt även med låst roder. Bra för mig, eftersom jag har ingen autopilot.
2008-12-07 @ 21:37
Dette hadde vært spennede. Har seilt med ulike Raymarine piloter og de har jo vært greie nok, men jeg har aldri kalibrert dem så mye. I høst leide jeg en Pogo 10,50 og den hadde en NKE Gyropilot. Den var fantastisk bra, til tross for at den hadde et meget dårlig brukergrensesnitt. Selv har jeg nå kjøpt en RM1350 som skal leveres i september -09 og den kommer til å seiles mye familie og noe tomannsseilinger så da er en god pilot meget viktig. Uansett ville det vært knall å lere hvordan få det beste ut av enheten.
2008-12-07 @ 23:16
Jag är nog inte rätt målgrupp och kvalificerar mig inte men om det finns en plats över så skulle jag vara intresserad ändå….
/Johan
2008-12-07 @ 23:19
Min ringa kunskap om reglerteknik (grundkurs 4p) säger mig att det är i stort sett omöjligt att ställa in tex en PID-regulator genom att pröva sig fram. Så en kurs är nog bra. Skulle vara intressant att höra mer om tekniken bakom.
Jag har pratat med flera som beklagat sig över att att autopiloten inte klarar av tex sjögång snett bakifrån, vilket är lite märkligt. Kan man reglera ett JAS-plan så borde man kunna göra en autopilot som klarar allt. För få givare, långsamt system, mycket brus, eller?
2008-12-08 @ 00:06
Min pilot blev som en helt annan “människa” när jag eftermonterade ett gyro (upgrade till S3G med linjärmotor direkt på kvadranten). Den styr nu väldigt bra även med sjön bakifrån tycker jag. Men jag har inte så mycket annat att jämföra med.
2008-12-08 @ 08:39
Undra när tillverkarna skall implementera fuzzy logic ihop med vindmätaren. då slipper man ställa om för olika väder.
Och sedan kan man undra varför man inte mäter hur hårt piloten måste hålla i rodret. Det är en ganska viktig information på hur man skall styra.
Men någon gång kanske autopiloter kommer med in i 2000 talet…
2008-12-08 @ 16:46
Ser framemot en kurs i “Pimp my autopilot”.
2008-12-11 @ 23:06
Lars S
Klart intresserad, Peter. Som jag sagt tidigare i seminariediskussioner kan jag ställa upp med fina utbildningslokaler centralt i Stockholm (ca 10 min gångavstånd från Centralstationen). Skulle gärna se att vi också diskuterade mer om ett ev Expeditionseminarium (diskuterades i våras).
Lasse
2009-08-30 @ 23:23
Någon som har erfarenhet från både Nexus och Raymarine piloter. För och nackdelar. Raymarines nya känns onekligen modernare än Nexus men vilken funkar bäst ?
2009-08-31 @ 08:24
Läs senaste Yachting world sptemeber utgåvan sidan 44 “The great atlantic gear test” om vad seglarna tycker om autopiloter och en rad andra utrustningar. Silvan fanns tyvärr inte med. Rätt kalibrerad är Raymarin smart pilot med gyro en mkt bra autopilot.
Under vissa förhållande över tiden är en autopilot minst lika snabb som en rorsman.
Ingen erfarenhet av Silvas autopilot men av silvas instrument, utmärkta.
“Sjöglans” Dehler 39SQ
2009-08-31 @ 08:27
Jag ser autopilot som säkerhetsutrustning, spec. viktigt för shorthanded.
Att kunna ha autopilot vid tex. hissning, revning, sätta spinnacker etc. gör det säkrare och möjligt då man är solo.
Har en NKE Gyropilot 2 som jag är mycket nöjd med. Kör med grundinställning och även om det knappast är optimalt så är det fullt tillräckligt för mig. Skall klara (tack vare gyrot och stark hydrualkolv) spinnacker i hög sjö, men det har jag inte vågat prova än.
Vore kul att höra från andra med NKE och även synpunkter på min syn på autopilot som “säkerhetsutrustning”.
2009-08-31 @ 09:13
Vindroder anybody?
/petter
2009-09-01 @ 08:10
Vindroders starka sida är halvvind till kryss på tyngre båtar. Där ändrar sig den skenbara vinden bara marginellt. Med en lite modernare båt på undanvind så blir det för stor skillnad i fart i vågorna.
Det går att köra de flesta kraftigare autopiloter på vindgivaren men då tack vare hopkopplingen av instrumenten så man får den sanna vinden.
2009-09-01 @ 10:47
Om jag inte är helt förvirrad så satt det gärna ett monitor vindroder på BOC enmans racers runt jorden för ett 10 tal år sedan. Dessa kan ha varit föregångare till Imoca 60 och måste ha gått som bara den.
Själv har jag bara positiva erfarenheter av Aries pendelservovindroder som skötte vår båt Mistral 33 under alla förhållanden i medelhavet i två år Allt från lätt läns till 33m/s mellan frankrike och corsica.
2009-09-01 @ 14:03
Det kan nog stämma att några hade sådana så sent som för tio år sedan. Det var nog två anledningar; elbrist ombord och att de nya gyro-piloterna inte hade kommit (som även kan styra på sann vindvinkel).
Djup slör och läns är vindrodrens svagare sida eftersom det inte blir mycket relativ vind kvar att påverka flöjeln med.
Man kan även koppla ihop skot och rorkult med några gummilinor och få en oelektrisk autopilot ;-)
Läs mer om J/80 över Atlanten:
http://adventure.roxen.se/
… eller titta på film om självstyrningen:
http://www.youtube.com/watch?v=tUcYQCKP7CU
2009-09-04 @ 16:11
Har använd både Silvas och Raymarines piloter (utan gyro) kan inte säga att den ena är bättre än den andra. Däremot är kontrolldisplayen enklare att hantera på Raymarines tycker jag. Problem har jag dock haft med Nexus/Silvas ekolod som ganska ofta visar typ 1 meters djup när det är betydligt djupare. Detta problem uppstår i synnerhet i hamnar o dyl. Verkar som lodet störs av andra båtar. Har ej fått någon vettig förklaring av Nexus.
2009-09-04 @ 18:47
Har du använt gamla eller nya kompassen?
2009-09-04 @ 21:27
Den gamla